" Tu veux être mon ami? "
C-ubane
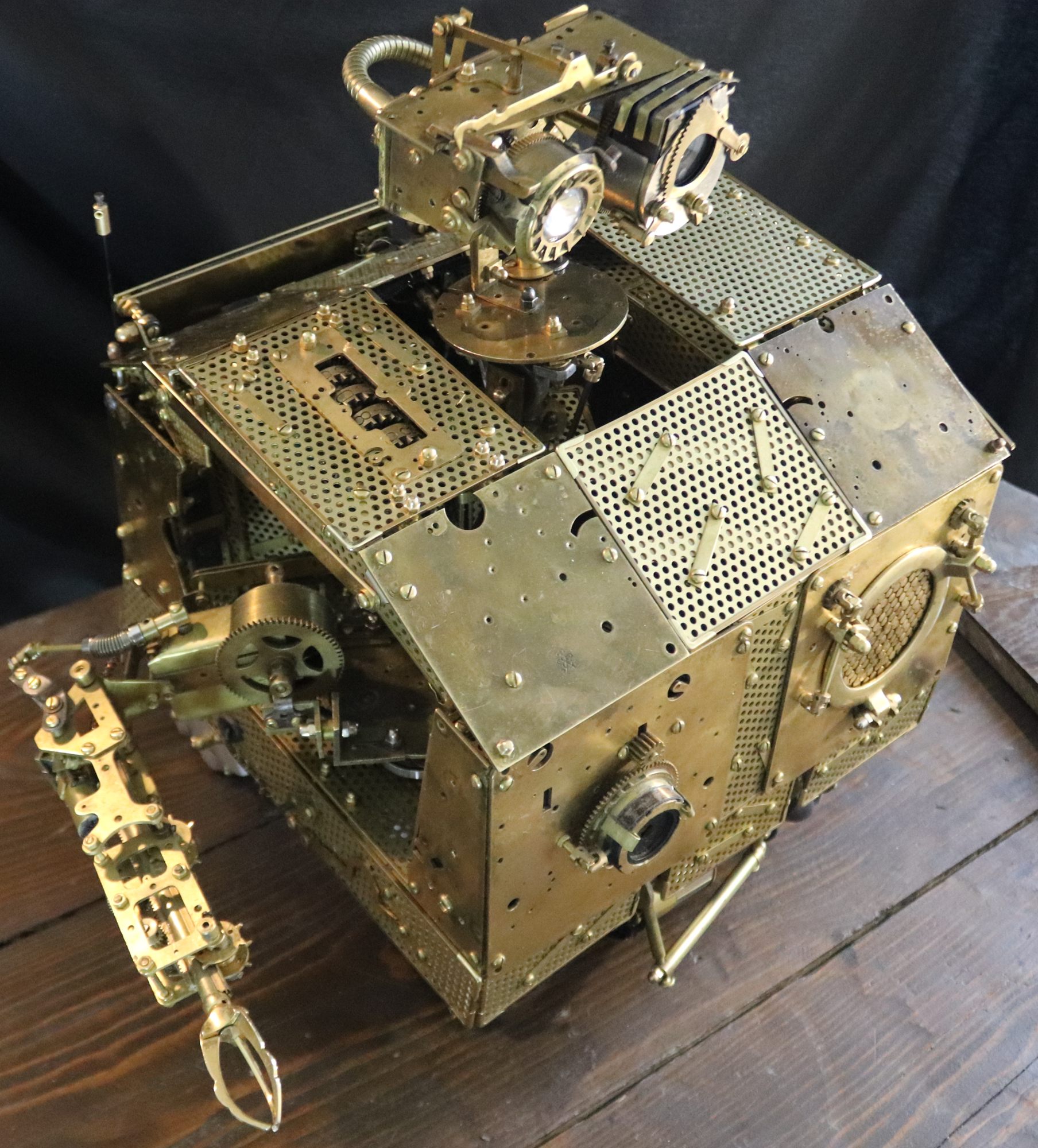
Petit robot gentil et sympathique ayant une forme cubique d'une trentaines de centimètre d'arête et construit en laiton avec des matériaux largement recyclé d'horloges anciennes.
Il est conçu pour un déplacement en ville, avec les objectifs techniques suivant :
- - une autonomie de 4 à 6 heures ( incluant la diffusion de vidéo )
- - la capacité de passer les petits trottoirs et obstacles
- - module d'affichage comportemental (1)
- - instrument à percussion automatisé pour produire des sons complexes
- - possibilité de recroqueviller ses membres pour se transformer en cube
- - mini machine à écrire ( peut-être )
Conception
100%
Réalisation
95%